
Project 22:
Automated and Connected Vehicle Implications and Analysis
Objective
This project will evaluate the usage and implementation of automated and connected vehicles (AV/CV). The project evaluation will be done through case studies with the results being applied to determine appropriate vehicle applications and how EVs will participate in this new transportation future.
Brief Description
Automated and connected vehicles (ACV) can significantly reduce crashes, energy consumption, pollution and the costs of congestion which in turn will offer a fundamental change to the U.S. transportation network. In September 2016, the U.S. Department of Transportation (USDOT) issued its policy for automated vehicles. The policy sets an approach to providing safety assurance and facilitating innovation through four key parts. The objective of this technology assessment project is to evaluate ACV technologies, actions, laws and policies that are now in place or proposed and to assess future ACV usage. The assessment also evaluates the highest level of automated vehicles called autonomous or self-driving vehicles and includes how electric vehicles (EVs) will participate in the future ACV transportation system. The future dollar value is huge with multi-billion dollar investments being made by auto manufacturers, ride sharing companies and technological innovators all looking to establish their positions. EVs will play a major role in this new future due to regulatory reasons (gas mileage and no urban emissions) and engineering reasons (fewer moving parts, reduced maintenance, and vehicles that are configured to drive, steer and brake by wire).
Research Results
The technology world for automated, autonomous and connected vehicles (ACV) and their use can be separated into two areas - one being the technology research and development done by the automotive, university, information technology (IT) innovators and engineers and the other being the actions by federal, state and local governments whose activities in R&D, laws, policies and demonstrations are needed and required to implement the technologies.
The definitions for automated, autonomous and connected vehicles are as follows:
- Automated vehicle is a vehicle that has some level of convenience or safety-critical control functions that occur without direct driver input. In defining automated vehicles there are, in reality, two definitions - automated as defined in the previous sentence and autonomous which is defined as a driverless or self-driving vehicle.
- Connected vehicles (CV) employ vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication to provide real-time warnings to a human driver to help avoid crashes and increase vehicle efficiency. Additional information can include traffic signal status, traffic congestion and construction warnings, as well as impending severe weather events. CV technologies can also allow non-vehicular systems such as the traffic signal control system to react to real-time information from the vehicle.
The definitions of the Level of Vehicle Automation as defined by the National Highway Traffic Safety Administration (NHTSA) are as follows:
- Level 0: No Automation. Driver is in complete control at all times. These vehicles can have driver helping systems such as lane departure warning, blind spot, forward collision warning.
- Level 1: Function Specific Automation. The driver has overall control and is responsible for safe operation, but can choose to cede limited authority over a primary control. Examples are cruise control, automatic braking and lane keeping.
- Level 2: Combined Function Automation. Automation of at least two primary control functions designed to work in unison to release driver control. Example is adaptive cruise control in combination with lane centering. Driver is disengaged.
- Level 3: Limited Self-Driving Automation. Automation allows the driver to cede full control of all safety functions under certain traffic or environmental conditions. Driver is not expected to constantly monitor the road, but must be able to reengage the driving task.
- Level 4: Full Self-Driving Automation. Vehicle performs all driving functions and monitors roadway conditions.
AVs and CVs are technologies that enhance and improved a mode of transportation by being inter-connected within the transportation network. These vehicles will require some dedicated infrastructure development but most of the technology will be embedded in the individual vehicle and will traverse existing networks (i.e., cellular, satellite, etc.). Equipping cars and light vehicles with this technology will significantly reduce crashes, energy consumption, pollution and the costs of congestion.
Looking at automobiles in their normal driving environment presents a great challenge in technology and policy. Almost all present vehicles have some type of automated function. Examples are: cruise control, anti-locking brakes, lane departure warning, blind spot monitoring, back-up cameras and sensing, automatic collision notification, intelligent or automatic parking assist, night vision with object detection, adaptive cruise control, adoptive headlight and forward collision warning. These driving functions are at levels 0, 1 and 2 dependent upon the function. Levels 3 and 4 are almost entirely in the R&D stage, but some OEMs are close to Level 3. For example, Tesla implemented its auto pilot technology in October 2015. Cadillac and Volvo have also announced Level 3 vehicles in 2016, but they are not currently available. Level 4, full self-driving automation vehicles have been demonstrated by many auto companies and research organizations that include Google, Carnegie Mellon University, Mercedes, GM, Nissan, Audi, to name a few.
1. Autonomous Vehicles
Fully automated (sometimes called autonomous) or “self-driving” vehicles are defined NHTSA as “those in which operation of the vehicle occurs without direct driver input to control the steering, acceleration, and braking and are designed so that the driver is not expected to constantly monitor the roadway while operating in self-driving mode.”
Note is made that auto manufacturers draw a distinction between autonomous cars and self-driving cars. Autonomous cars will look like the vehicles we drive today with technology systems taking over from the driver under certain circumstances while self-driving cars are a stage further on. However, the self-driving vehicle could lose the steering wheel and the vehicle will do all the driving using a system of sensors, radar and GPS mapping that autonomous vehicles will employ. While personal cars will remain, the future will see a fleet of self-driving shared vehicles filling the streets of towns and cities.
Driverless or autonomous vehicles will usher in a revolution in both safety and fuel efficiency. Addressing first, the safety aspects, a study from McKinsey & Company, found the potential for a reduction of up to 90 percent in driving fatalities by using self-driving cars is due to the fact that computers are so much better drivers than error-and distraction-prone humans. In the U.S. alone, this would equate to about 30,000 lives saved each year and up to $190 billion in annual savings from healthcare costs associated with accidents. This translates to 10 million lives saved globally each decade.
In the energy area, a recent study found that driverless cars and car-sharing services could save up to 90 percent of the fuel we currently consume, mainly through “right-sizing” the vehicle required for each task. If a person needs a quick ride five miles from town, a single-person self-driving EV would pick that passenger up and take him or her to the desired destination. If a family needs an electric SUV for a beach excursion, that would be provided. By right-sizing each vehicle for each trip, the needless transportation of tons of steel would be dramatically reduced from today’s highly wasteful default driving situation. In addition, driverless cars can be actively driven for far more hours in the day through car-share services like Uber and Lyft, further increasing the efficiency of our entire transportation system.
Autonomous vehicles sense their surroundings with techniques such as radar, LIDAR, GPS, odometry, and computer vision. Advanced control systems interpret sensory information to identify appropriate navigation paths, as well as obstacles and relevant signage. By definition, autonomous vehicles are capable of updating their maps based on sensory input, allowing the vehicles to keep track of their position even when conditions change or when they enter uncharted environments. Autonomous cars have control systems that are capable of analyzing sensory data to distinguish between different cars on the road, which is very useful in planning a route to the desired destination. AVs and CVs are technologies that enhance and improved a mode of transportation by being interconnected within the transportation network. These vehicles will require some dedicated infrastructure development but most of the technology will be embedded in the individual vehicle and will traverse existing networks (i.e., cellular, satellite, etc.).
The advantages of autonomous vehicles are numerous, however, there are problems and obstacles to be overcome. Items such as who is liable for accident damage; IT software reliability, and its subject to compromise; laws and regulations for use; loss of drivers ability to control the auto; drivers being inexperienced if manual driving is required; driving retail jobs, and privacy: ethical problems in an unavoidable crash and the ability of systems to operate in extreme weather conditions - rain and snow are examples of some. In fact, tests have already been conducted that show autonomous vehicles have the same problems as humans on snow or ice.
How close are we to self-driving cars? The news for the past months is filled with stories. Noteworthy ones are:
- The first story is Tesla which unveiled and installed its autopilot technology over the cellular phone network last October 2015. The reaction from Tesla owners seems to be generally positive, even though there have been some issues and a few negative reactions. Tesla made clear that its new feature is still in beta mode and is not a full autopilot.
- In September 2016, Uber has placed self-driving cars in the downtown area of Pittsburg, PA. The cars are Uber modified Ford Fusion hybrids outfitted with more than 20 cameras, seven lasers, a spinning 306-drgree laser-based detection system and over 1000 aftermarket parts to drive the vehicle.
- Ford plans to build self-driving cars within 5 years.
- Ride-sharing companies are moving rapidly to self-driving and EVs for a variety of reasons.
- A driverless bus is now operating in Helsinki, Finland (November 2016).
2. Electric Vehicles and AVC
As the transportation sector grapples with ACVs, the role of how electric vehicles (EVs) fit into the ACV path is not clearly defined. There is no doubt that in time EVs will play a fundamental role. “Right-Sizing” an electric autonomous vehicle requires much less effort than what is required for a vehicle with an internal combustion engine (ICE). ICE vehicles have hundreds of parts that have to be combined, electric vehicles simply require an adjustment to battery and motor size.
When automatous vehicles become a player in the market place, the driverless cars are most likely to be EVs. Mobility operators such as Uber or Lyte see EVs as the vehicle options since EVs are less costly to maintain and operate. EVs also offer the more acceptable and easier means for rapid development and testing. This virtuous cycle is shown in the below figure where EVs, driverless cars and car sharing services complement each other.
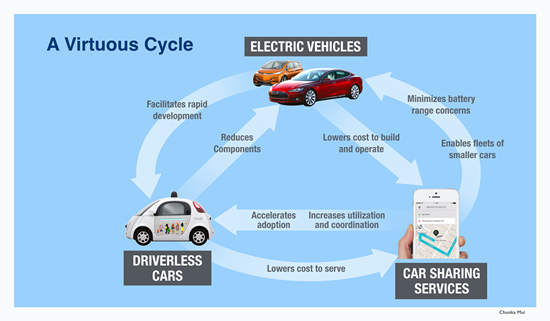 |
From: https://www.linkedin.com/pulse/virtuous-cycle-between-driverless-cars-electric-vehicles-chunka-mui |
And, the future dollar value is huge. Multi-billion dollar investments are being made by auto manufacturers, ride sharing companies and technological innovators who are all looking for positions in the new vehicle future. EVs will play a major role in this new future due to regulatory reasons (gas mileage and no urban emissions) and engineering reasons (fewer moving parts, reduced maintenance, and vehicles that are configured to drive, steer and brake by wire).
3. Connected Vehicles
Connected vehicles are vehicles that use any of a number of different communication technologies to wirelessly communicate with the driver, other cars on the road (V2V), roadside infrastructure (V2I), and the “Cloud.” CV technology can revolutionize vehicular travel as we know it today. Connected vehicles can improve vehicle safety, improve vehicle efficiency, improve commuting times, greatly reduce crashes, reduce the need for new infrastructure, improve energy efficiency by more efficient driving, reduce travel times, provide lighter, more fuel-efficient vehicles and create more efficient infrastructure that will reduce energy consumption and expand opportunities for vehicle ownership by multiple ownership of self-driving vehicles.
With regard to wireless communication, almost all cars after 2010 have in-dash communication systems with screen offering items such as music/audio, navigation, roadside assistance, parking apps, vehicle unlocking and engine control and diagnosing. On EV vehicles, phone apps offer charging station location and distance.
The connected car hardware most commonly used has a proprietary based internet connection and software such as global system for mobile communication modules (GSM) which is integrated into the car’s IT system. There are also consumer purchased systems that are plugged into the car’s on-board diagnostic port which could allow smart phone apps. Some modern examples of vehicle connectivity are General Motor’s OnStar, Ford’s Sync, and Chrysler’s Uconnect.
Although adding connectivity to vehicles has its benefits, it also has challenges. By adding connectivity, there are issues with security, privacy, data analytics, and aggregation due to the abundance of data associated with vehicles. The increased technical complexity of vehicles makes them more prone to “Bugs” and other system malfunctions can effectively immobilize an ACV.
The U.S. Department of Transportation (DOT) in a joint research effort with the Society of Automotive Engineers (SAE) has already started setting V2V and V2I communication standards, such as using a 5 GHZ frequency for transmission.
4. Laws, Policies and Governmental Actions
A most important aspect of ACV technology development is the enactment of laws and policies and research actions by the federal, state and local governments. This section looks at laws, policies and actions that have been enacted beginning with the federal actions followed by the states. Note is made that almost all of the enacted laws and policies refer to autonomous vehicle and do not specifically mention automated or connected vehicles. In addition, the intent of the U.S. laws, policies and actions are to bring safer vehicles to use by the public as fast as possible without hindering technology development.
4.1 Federal Actions
U.S. Department of Transportation (USDOT) -- The National Highway Traffic Safety Administration's (NHTSA) produced its Preliminary Statement of Policy on Autonomous Vehicles in May 2013. In September 2016, the USDOT issued its policy for automated vehicles. The policy sets an approach to providing safety assurance and facilitating innovation through four key parts. Vehicle performance guidance uses a 15-point Safety Assessment to set clear expectations for manufacturers developing and deploying automated vehicle technologies. Model state policy delineates the Federal and State roles for the regulation of highly automated vehicle technologies as part of an effort to build a consistent national framework of laws to govern self-driving vehicles. Finally, the policy outlines options for the further use of current federal authorities to expedite the safe introduction of highly automated vehicles into the marketplace, as well as discusses new tools and authorities the federal government may need as the technology evolves and is deployed more widely used. The full policy and additional materials can be found at www.transportation.gov/AV.
Other US DOT activities include the announced $42 million in awards, in September 2015, to Wave 1 participants in the Connected Vehicle Pilot Deployment Program. The three sites collectively envision a broad spectrum of applications enabled by connected vehicle technologies and driven by site-specific needs. The three Wave 1 sites are:
- Using connected vehicle technologies to improve safe and efficient truck movement along I-80 in southern Wyoming,
- Exploiting vehicle-to-vehicle (V2V) and intersection communications to improve vehicle flow and pedestrian safety in high-priority corridors in New York City,
- Deploying multiple safety and mobility applications on and in proximity to reversible freeway lanes in Tampa, Florida.
Another major USDOT program is the Smart Cities Challenge project which was announced by DOT in December 2015. On March 12, 2016, Secretary Foxx announced seven city finalists from 78 applicants for the Smart City Challenge. The pre-finalists are: Austin, TX; Columbus, OH; Denver, CO; Kansas City, MO; Pittsburgh, PA; Portland, OR; and San Francisco, CA. The USDOT has pledged to help one, “Smart City, “to become the country’s first city to fully integrate innovative technologies - self-driving cars, connected vehicles, and smart sensors - into their transportation network. And, on June 23, 2016, Secretary Foxx announced that Columbus, OH has been selected as the winner of the Smart City Challenge. As winner of the Challenge, Columbus will receive up to $40 million from U.S. DOT and up to $10 million from Paul G. Allen’s Vulcan Inc. to supplement the $90 million that the city has already raised from other private partners to carry out its plan. Using these resources, Columbus will work to reshape its transportation system to become part of a fully-integrated city that harnesses the power and potential of data, technology, and creativity to reimagine how people and goods move throughout their city.
Columbus was selected as the winner because it put forward an impressive, holistic vision for how technology can help all of the city’s residents to move more easily and to access opportunity. The city proposed to deploy three electric self-driving shuttles to link a new bus rapid transit center to a retail district, connecting more residents to jobs. Columbus also plans to use data analytics to improve health care access in a neighborhood that currently has an infant mortality rate four times that of the national average, allowing them to provide improved transportation options to those most in need of prenatal care.
U. S. Department of Energy -- The U. S. Department of Energy has numerous programs directed at electric vehicles (EVs) and to a lesser extend to ACV technologies. The EV programs have the goals of cutting battery costs from their current $500/kWh to $124/kWh, increasing energy density from 50 Wh/L to 400 Wh/L, eliminating almost 30% of vehicle weight through light-weight materials, and reducing the cost of electric drive systems from $40/kW to $8/kW/. In the ACV area, DOE has funded a $2.7 million project with the University of Michigan to study whether vehicles that communicate with each other and their surroundings can help people drive more efficiently. The study may include both personal and commercial light duty vehicles, with a focus on hybrid electric and plug-in electric vehicles.
4.2 State Legislative Actions
The first state to authorize the operation of autonomous vehicles was Nevada in 2011. Since then, there are eight states, California, Florida, Louisiana, Michigan, Nevada, North Dakota, Tennessee and Utah and Washington D.C. that have passed legislation related to autonomous vehicles. And, there are legislative actions in 10 additional states as shown in the below figure:
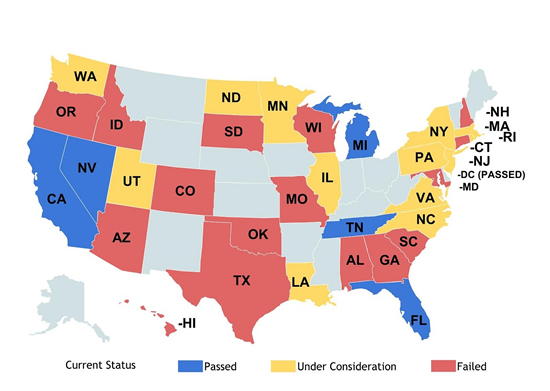 |
These eight state and D.C. actions are summarized as follows.
California legislation defines "autonomous technology," "autonomous vehicle," and "operator"; finds that the state "presently does not prohibit or specifically regulate the operation of autonomous vehicles"; requires rulemaking; permits current operation under certain conditions; imposes additional oversight on the operation of vehicles without a human in the driver's seat; and requires that the "manufacturer of the autonomous technology installed on a vehicle shall provide a written disclosure to the purchaser of an autonomous vehicle that describes what information is collected by the autonomous technology equipped on the vehicle."
Florida was the second state to adopt legislation allowing for automated vehicle testing on public roadways (in 2012). Florida Statue 316.85 addresses the testing of automated vehicles, specifying that “a person who possesses a valid driver license [specific to autonomous vehicles] may operate an autonomous vehicle in autonomous mode.” Such licenses are only valid for testing by authorized persons designated by the manufacturer of autonomous vehicle technologies.
Louisiana has defined autonomous technology for purposes of the Highway Regulatory Act.
Michigan has defined "automated technology," "automated vehicle," "automated mode," and "upfitter," and expressly permits testing of automated vehicles by certain parties under certain conditions. Michigan has also defined “operator”, addressed liability of the original manufacturer of a vehicle on which a third party has installed an automated system and directed state DOT with the Secretary of State to submit a report on these issues by February 1, 2016.
Nevada has defined "autonomous vehicle" and directed state DMV to adopt rules for license endorsement and for operation, including insurance, safety standards, and testing.
North Dakota has established a legislative management study of automated vehicles.
Tennessee legislation prohibits local governments from prohibiting the use of a vehicle solely on the basis of it being equipped with autonomous technology if the vehicle otherwise complies with applicable safety regulations, defines "autonomous technology" as technology "that has the capability to drive [a] motor vehicle without the active physical control or monitoring by a human operator."
Utah has authorized the department of transportation to conduct a connected vehicle testing program.
Washington D.C. has defined "autonomous vehicle”," required a human driver "prepared to take control of the autonomous vehicle at any moment," restricted conversion to recent vehicles, and addresses liability of the original manufacturer of a converted vehicle. Passed Congressional review (April 2013).
4.3 Case Study of Florida Department of Transportation (FDOT) AV/CV Program
The Florida Department of Transportation (FDOT) is used as a case study for ACV projects at the state level. The FDOT program is summarized as follows:
- Florida has two designated U.S. DOT Connected Vehicle Test Beds.
- Three research projects are underway to address policy implications, improved mobility for the transportation disadvantaged and aging populations, and AV applications for transit operations.
- Two current pilot projects are testing various automated technologies that could assist driver safety and improve freight efficiency.
- Working Groups comprised of stakeholders are providing recommendations to FDOT and other state agencies on how to best integrate these emerging technologies into existing infrastructure and operations.
The FDOT plan for the deployment of AV/CV technologies on Florida’s public roadways has been established through its Florida Automated Vehicles (FAV) initiative. The FAV will create the framework for implementation by engaging stakeholders, developing research and pilot projects, and creating awareness of the technologies and how they support FDOT’s vision statement.
The FAV initiative deploys pilot projects to establish Florida as a leader by leading by example and in being an early adopter of the technology. The goals of the FAV pilot projects are:
- Leverage existing infrastructure to maximize benefits
- Develop rich dataset that demonstrates quantitative safety and efficiency gains
- Performance measures
- Comparative analysis before and after AV/CV technologies are deployed.
Pilot projects provide important data to help FDOT justify proposals or amendments to policy, design and engineering standards. Data that illustrates the use of automated vehicles on public roadways is extremely important because these type of data sets for real-world conditions are scarce. Pilot projects are:
Project 1-MobilEye - An implemented project to determine if MobilEye technology provides value in preventing avoidable traffic accidents by installing MobilEye’s Advanced Driver Assistant System (ADAS) on about 50 vehicles in the Tampa Bay area. The MobilEye device includes one forward looking camera and a LED display to provide visual and audible warnings to the vehicle operator of eminent forward collisions, lane departure alerts, and pedestrian/bicycle detection. If the warnings provided by the MobilEye devices allow FDOT vehicle operators to prevent collisions, the ADAS systems may be recommended for wide-scale adoption by FDOT.
Project 2 - AV/CV/ITS Freight Applications -- The project goal is to demonstrate that AV technologies can offer increased safety and efficiency for freight operations. This pilot will follow a three-phase approach to measure, deploy and prioritize portions of the perishable-goods delivery supply chain using the perishable flower industry at Miami Airport and the distribution center located in Miami-Dade County. The project’s objective is to show travel time reliability can be improved within the region surrounding the MIA by deploying AV technologies on a limited number of drayage operators’ fleet vehicles that agree to partner with the project.
FDOT is also collaborating with state universities to gain a better understanding of implications associated with planning for and integrating AV/CV technologies into Florida’s existing infrastructure. The projects are:
Florida State University - Enhanced Mobility for Aging Population Using Automated Vehicles -The research intent is to identify a possible pilot project, such as para-transit service, and to apply AV technology and determine a plan for implementation.
University of Florida - Policy Implications of Automated Vehicle Technology. - The research is to provide information and guidance in order to understand what changes may need to be made to existing Florida policy.
Embry-Riddle Aeronautical University - Autonomous Service Vehicle Project --The use of autonomous vehicles for pavement and roadside management services, herein referred to as autonomous service vehicles, has the potential to reduce budget and improve the local economy and safety of these operations. The service tasks of interest are: track drying, pavement inspection, and mowing.
Florida State University - Envisioning Florida’s Future: Transportation and Land Use in an Automated Vehicle World - The objective of this project is to provide FDOT and its partners with information and guidance on what the built environment could look like in 2040 and 2060 based on various levels of market penetration of AV/CV technologies.
University of Central Florida’s Electric Vehicle Transportation Center - An EVTC staff member participates as a member of the Florida Department of Transportation’s Automated Vehicles Technology and Infrastructure Working Group. The working group is tasked to identify challenges and opportunities associated with ACV technologies on public roadways, to discuss how the challenges could be mitigated and how to leverage the opportunities.
University of Central Florida - Investigation of Connected Vehicles to Inform Design of Automated Vehicle Systems -- The primary objective for this project is to investigate multimodal AV/CV displays for future vehicles to safely and quickly alert drivers of upcoming automation related vehicle warnings. Findings will result in requirements and recommendations for how to implement CV displays for ease of use and increased safety.
Impacts/Benefits of Implementation
The application of automated and connected vehicles (ACV) can fundamentally change the U.S. transportation network by reducing crashes, energy consumption, pollution and the costs of congestion. This project will evaluate present ACV usage through case studies and use these results to evaluate appropriate vehicle applications and to determine how EVs will participate in this new future transportation system.
Reports
Block, D., Kettles, D., Harrison, J. (2016). Automated, Autonomous and Connected Vehicle Technology Assessment (FSEC Rep. No. FSEC-CR-2020-16) Cocoa, FL: Florida Solar Energy Center.
Block, D., Raustad, R., (2017). Automated and Connected Vehicle Implications and Analysis (FSEC Rep No. FSEC-CR-2065-17) Cocoa, FL: Florida Solar Energy Center.
Project Title: University: Principal Investigator: PI Contact Information: Funding Source: Total Project Cost: Agency ID or Contract Number: Start date: End date: |